Momentum
From Wikipedia, the free encyclopedia
|
|
|
In a game of pool, momentum is conserved;
that is, if one ball stops dead after the collision, the other ball
will continue away with all the momentum. If the moving ball continues
or is deflected then both balls will carry a portion of the momentum
from the collision,
|
| Common symbol(s): |
p, p |
| SI unit: |
kg m/s or N s |
In
classical mechanics,
linear momentum or
translational momentum (
pl. momenta;
SI unit
kg m/s, or equivalently,
N s) is the product of the
mass and
velocity
of an object. For example, a heavy truck moving fast has a large
momentum—it takes a large and prolonged force to get the truck up to
this speed, and it takes a large and prolonged force to bring it to a
stop afterwards. If the truck were lighter, or moving more slowly, then
it would have less momentum.
Like velocity, linear momentum is a
vector quantity, possessing a direction as well as a magnitude:

Linear momentum is also a
conserved quantity, meaning that if a
closed system is not affected by external forces, its total linear momentum cannot change. In classical mechanics,
conservation of linear momentum is implied by
Newton's laws; but it also holds in
special relativity (with a modified formula) and, with appropriate definitions, a (generalized) linear momentum
conservation law holds in
electrodynamics,
quantum mechanics,
quantum field theory, and
general relativity.
Newtonian mechanics
Momentum has a direction as well as magnitude. Quantities that have
both a magnitude and a direction are known as vector quantities. Because
momentum has a direction, it can be used to predict the resulting
direction of objects after they collide, as well as their speeds. Below,
the basic properties of momentum are described in one dimension. The
vector equations are almost identical to the scalar equations (see
multiple dimensions).
Single particle
The momentum of a particle is traditionally represented by the letter
p. It is the product of two quantities, the
mass (represented by the letter
m) and
velocity (
v):
[1]

The units of momentum are the product of the units of mass and velocity. In
SI units,
if the mass is in kilograms and the velocity in meters per second, then
the momentum is in kilograms meters/second (kg m/s). Being a vector,
momentum has magnitude and direction. For example, a model airplane of
1 kg, traveling due north at 1 m/s in straight and level flight, has a
momentum of 1 kg m/s due north measured from the ground.
Many particles
The momentum of a system of particles is the sum of their momenta. If two particles have masses
m1 and
m2, and velocities
v1 and
v2, the total momentum is

The momenta of more than two particles can be added in the same way.
A system of particles has a
center of mass, a point determined by the weighted sum of their positions:

If all the particles are moving, the center of mass will generally be
moving as well. If the center of mass is moving at velocity
vcm, the momentum is:

This is known as
Euler's first law.
[2][3]
Relation to force
If a force
F is applied to a particle for a time interval
Δt, the momentum of the particle changes by an amount

In differential form, this gives
Newton's second law: the rate of change of the momentum of a particle is equal to the force
F acting on it:
[1]

If the force depends on time, the change in momentum (or
impulse) between times
t1 and
t2 is

The second law only applies to a particle that does not exchange matter with its surroundings,
[4] and so it is equivalent to write

so the force is equal to mass times
acceleration.
[1]
Example: a model airplane of 1 kg accelerates from rest to a
velocity of 6 m/s due north in 2 s. The thrust required to produce this
acceleration is 3
newton. The change in momentum is 6 kg m/s. The rate of change of momentum is 3 (kg m/s)/s = 3 N.
Conservation
In a
closed system
(one that does not exchange any matter with the outside and is not
acted on by outside forces) the total momentum is constant. This fact,
known as the
law of conservation of momentum, is implied by
Newton's laws of motion.
[5]
Suppose, for example, that two particles interact. Because of the third
law, the forces between them are equal and opposite. If the particles
are numbered 1 and 2, the second law states that
F1 = dp1/dt and
F2 = dp2/dt. Therefore
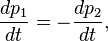
or
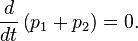
If the velocities of the particles are
u1 and
u2 before the interaction, and afterwards they are
v1 and
v2, then

This law holds no matter how complicated the force is between
particles. Similarly, if there are several particles, the momentum
exchanged between each pair of particles adds up to zero, so the total
change in momentum is zero. This conservation law applies to all
interactions, including
collisions and separations caused by explosive forces.
[5] It can also be generalized to situations where Newton's laws do not hold, for example in the
theory of relativity and in
electrodynamics.
[6]
Dependence on reference frame

Newton's apple in Einstein's elevator. In person A's frame of reference,
the apple has non-zero velocity and momentum. In the elevator's and
person B's frames of reference, it has zero velocity and momentum.
Momentum is a measurable quantity, and the measurement depends on the
motion of the observer. For example, if an apple is sitting in a glass
elevator that is descending, an outside observer looking into the
elevator sees the apple moving, so to that observer the apple has a
nonzero momentum. To someone inside the elevator, the apple does not
move, so it has zero momentum. The two observers each have a
frame of reference
in which they observe motions, and if the elevator is descending
steadily they will see behavior that is consistent with the same
physical laws.
Suppose a particle has position
x in a stationary frame of reference. From the point of view of another frame of reference moving at a uniform speed
u, the position (represented by a primed coordinate) changes with time as

This is called a
Galilean transformation. If the particle is moving at speed
dx/dt = v in the first frame of reference, in the second it is moving at speed

Since
u does not change, the accelerations are the same:

Thus, momentum is conserved in both reference frames. Moreover, as
long as the force has the same form in both frames, Newton's second law
is unchanged. Forces such as Newtonian gravity, which depend only on the
scalar distance between objects, satisfy this criterion. This
independence of reference frame is called Newtonian relativity or
Galilean invariance.
[7]
A change of reference frame can often simplify calculations of
motion. For example, in a collision of two particles a reference frame
can be chosen where one particle begins at rest. Another commonly used
reference frame is the
center of mass frame, one that is moving with the center of mass. In this frame, the total momentum is zero.
Application to collisions
By itself, the law of conservation of momentum is not enough to
determine the motion of particles after a collision. Another property of
the motion,
kinetic energy, must be known. This is not necessarily conserved. If it is conserved, the collision is called an
elastic collision; if not, it is an
inelastic collision.
Elastic collisions

Elastic collision of equal masses

Elastic collision of unequal masses
An elastic collision is one in which no kinetic energy is lost.
Perfectly elastic "collisions" can occur when the objects do not touch
each other, as for example in atomic or nuclear scattering where
electric repulsion keeps them apart. A
slingshot maneuver of a satellite around a planet can also be viewed as a perfectly elastic collision from a distance. A collision between two
pool balls is a good example of an
almost totally elastic collision, due to their high
rigidity; but when bodies come in contact there is always some
dissipation.
[8]
A head-on elastic collision between two bodies can be represented by
velocities in one dimension, along a line passing through the bodies. If
the velocities are
u1 and
u2 before the collision and
v1 and
v2 after, the equations expressing conservation of momentum and kinetic energy are:

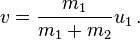
A change of reference frame can often simplify the analysis of a
collision. For example, suppose there are two bodies of equal mass
m, one stationary and one approaching the other at a speed
v (as in the figure). The center of mass is moving at speed
v/2 and both bodies are moving towards it at speed
v/2.
Because of the symmetry, after the collision both must be moving away
from the center of mass at the same speed. Adding the speed of the
center of mass to both, we find that the body that was moving is now
stopped and the other is moving away at speed
v.
The bodies have exchanged their velocities. Regardless of the
velocities of the bodies, a switch to the center of mass frame leads us
to the same conclusion. Therefore, the final velocities are given by
[5]

In general, when the initial velocities are known, the final velocities are given by
[9]


If one body has much greater mass than the other, its velocity will
be little affected by a collision while the other body will experience a
large change.
Inelastic collisions

a perfectly inelastic collision between equal masses
In an inelastic collision, some of the
kinetic energy of the colliding bodies is converted into other forms of energy such as
heat or
sound. Examples include
traffic collisions,
[10]
in which the effect of lost kinetic energy can be seen in the damage to
the vehicles; electrons losing some of their energy to atoms (as in the
Franck–Hertz experiment);
[11] and
particle accelerators in which the kinetic energy is converted into mass in the form of new particles.
In a perfectly inelastic collision (such as a bug hitting a
windshield), both bodies have the same motion afterwards. If one body is
motionless to begin with, the equation for conservation of momentum is

so
In a frame of reference moving at the speed
v), the objects are brought to rest by the collision and 100% of the kinetic energy is converted.
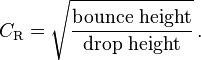
One measure of the inelasticity of the collision is the
coefficient of restitution CR,
defined as the ratio of relative velocity of separation to relative
velocity of approach. In applying this measure to ball sports, this can
be easily measured using the following formula:
[12]
The momentum and energy equations also apply to the motions of objects that begin together and then move apart. For example, an
explosion
is the result of a chain reaction that transforms potential energy
stored in chemical, mechanical, or nuclear form into kinetic energy,
acoustic energy, and electromagnetic radiation.
Rockets
also make use of conservation of momentum: propellant is thrust
outward, gaining momentum, and an equal and opposite momentum is
imparted to the rocket.
[13]
Multiple dimensions
Two-dimensional elastic collision. There is no motion perpendicular to
the image, so only two components are needed to represent the velocities
and momenta. The two blue vectors represent velocities after the
collision and add vectorially to get the initial (red) velocity.
Real motion has both direction and magnitude and must be represented by a
vector. In a coordinate system with
x, y, z axes, velocity has components
vx in the
x direction,
vy in the
y direction,
vz in the
z direction. The vector is represented by a boldface symbol:
[14]

Similarly, the momentum is a vector quantity and is represented by a boldface symbol:

The equations in the previous sections work in vector form if the scalars
p and
v are replaced by vectors
p and
v. Each vector equation represents three scalar equations. For example,

represents three equations:
[14]

The kinetic energy equations are exceptions to the above replacement
rule. The equations are still one-dimensional, but each scalar
represents the
magnitude of the vector, for example,

Each vector equation represents three scalar equations. Often
coordinates can be chosen so that only two components are needed, as in
the figure. Each component can be obtained separately and the results
combined to produce a vector result.
[14]
A simple construction involving the center of mass frame can be used
to show that if a stationary elastic sphere is struck by a moving
sphere, the two will head off at right angles after the collision (as in
the figure).
[15]
Objects of variable mass
The concept of momentum plays a fundamental role in explaining the behavior of
variable-mass objects such as a
rocket ejecting fuel or a
star accreting gas. In analyzing such an object, one treats the object's mass as a function that varies with time:
m(t). The momentum of the object at time
t is therefore
p(t) = m(t)v(t). One might then try to invoke Newton's second law of motion by saying that the external force
F on the object is related to its momentum
p(t) by
F = dp/dt, but this is incorrect, as is the related expression found by applying the product rule to
d(mv)/dt:
[16]

This equation does not correctly describe the motion of variable-mass objects. The correct equation is

where
u is the velocity of the ejected/accreted mass
as seen in the object's rest frame.
[16] This is distinct from
v, which is the velocity of the object itself as seen in an inertial frame.
This equation is derived by keeping track of both the momentum of the
object as well as the momentum of the ejected/accreted mass. When
considered together, the object and the mass constitute a closed system
in which total momentum is conserved.
Generalized coordinates
Newton's laws can be difficult to apply to many kinds of motion because the motion is limited by
constraints.
For example, a bead on an abacus is constrained to move along its wire
and a pendulum bob is constrained to swing at a fixed distance from the
pivot. Many such constraints can be incorporated by changing the normal
Cartesian coordinates to a set of
generalized coordinates that may be fewer in number.
[17] Refined mathematical methods have been developed for solving mechanics problems in generalized coordinates. They introduce a
generalized momentum, also known as the
canonical or
conjugate momentum, that extends the concepts of both linear momentum and
angular momentum. To distinguish it from generalized momentum, the product of mass and velocity is also referred to as
mechanical,
kinetic or
kinematic momentum.
[6][18][19] The two main methods are described below.
Lagrangian mechanics
In
Lagrangian mechanics, a Lagrangian is defined as the difference between the
kinetic energy T and the
potential energy V:

If the generalized coordinates are represented as a vector
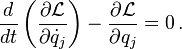
q = (q1, q2, ... , qN) and time differentiation is represented by a dot over the variable, then the equations of motion (known as the Lagrange or
Euler–Lagrange equations) are a set of
N equations:
[20]
If a coordinate
qi is not a Cartesian coordinate, the associated generalized momentum component
pi does not necessarily have the dimensions of linear momentum. Even if
qi is a Cartesian coordinate,
pi will not be the same as the mechanical momentum if the potential depends on velocity.
[6] Some sources represent the kinematic momentum by the symbol
Π.
[21]
In this mathematical framework, a generalized momentum is associated
with the generalized coordinates. Its components are defined as

Each component
pj is said to be the
conjugate momentum for the coordinate
qj.
Now if a given coordinate
qi does not appear in the Lagrangian (although its time derivative might appear), then

This is the generalization of the conservation of momentum.
[6]
Even if the generalized coordinates are just the ordinary spatial
coordinates, the conjugate momenta are not necessarily the ordinary
momentum coordinates. An example is found in the section on
electromagnetism.
Hamiltonian mechanics
In
Hamiltonian mechanics,
the Lagrangian (a function of generalized coordinates and their
derivatives) is replaced by a Hamiltonian that is a function of
generalized coordinates and momentum. The Hamiltonian is defined as





Tidak ada komentar:
Posting Komentar